
Cart is empty.
Item Quantity Price Total: $0

AN #112 - Speed controller for model boats
RC SPEED CONTROLLER
BASIC DESCRIPTION
This application note describes a circuit designed to control the speed of a dc motor used in radio-controlled boats. The electronic speed controller (ESC) is a "no-brake, forward-only" controller. I wanted to keep the part count low and the circuit simple so a couple features were sacrificed. The circuit does not have: over-current protection, over-temp protection, polarity protection, or over/under voltage protection. All the parts can be obtained from digikey distributors. The circuit was designed with a popular 12-cell model boat motor in mind (graupner speed 700). This project was my first attempt at using Bascom-avr and Atmel microcontrollers.
CIRCUIT DESCRIPTION
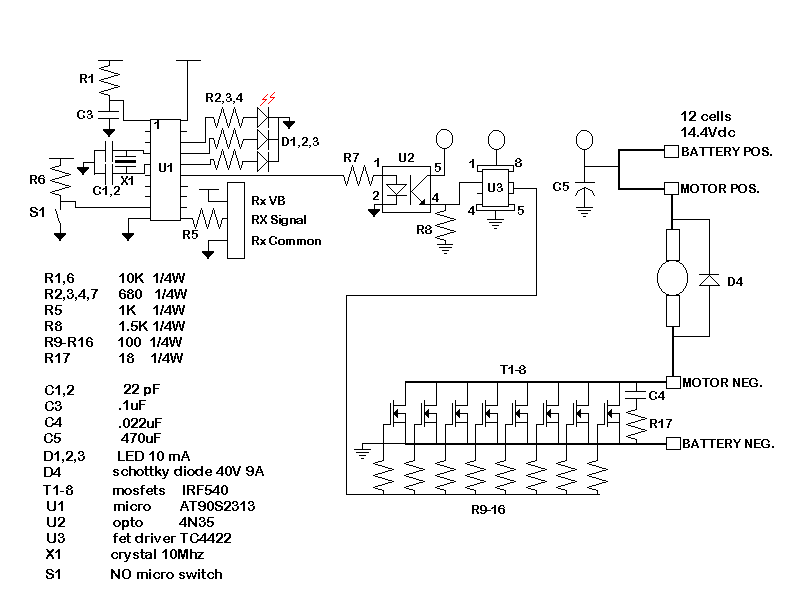
The ESC is designed around an Atmel AT90S2313 microcontroller. I chose to build the circuit on two separate boards, a digital control board, and a FET driver board. The digital control section is powered by 4.8-6Vdc from the receiver and the FET driver section is powered by 12 NiCad cells (14.4Vdc).
The ESC receives the 1-2mS pulses from the receiver and converts it into a 2400Hz PWM signal that drives the FET board controlling the motor. The AT90S2313 converts the receiver signal into the motor drive signal then feeds it into an opto-isolator. The isolator converts the logic level signal into the 14.4Vdc signal needed for FET operation. The signal is then fed into a 9A FET driver chip. The FET driver is responsible for providing the short high current pulses needed to overcome gate capacitance. Three LEDS and a button are used for calibrating/arming the controller.
SOFTWARE DESCRIPTION
The software begins by calculating the center and full forward values. A button is pushed when the transmitter stick is at center and once again when the stick is full forward. These values are stored as Dbf and C. After storing the center and forward values, the software waits for the stick to return to center before arming the circuit. The armed led will come on after the stick is returned to center. Next a continuous loop of measuring the RX signal and updating the PWM drive signal is performed. IF two consecutive pulses are missed, the "mispulse" routine will turn off the motor drive.
OPERATION
- Connect receiver to the ESC receiver connections.
- Connect motor to the ESC motor connections.
- Connect battery to the ESC battery connections.
- Turn on receiver switch. Two ESC LEDs should be on.
- Turn on transmitter.
- Press the calibrate button once with the transmitter in a neutral position. Center LED should go out.
- Press the calibrate button once again with the transmitter in a full-forward position. The forward LED should go out.
- Return transmitter to a neutral position. The Armed LED should go on. The speed controller is ready.
FINAL NOTES
I chose to build the circuit using point-to-point because of the relatively low parts count and large wires needed for current handling. The thick traces on the schematic represent where 12 gage wire should be used. Circuit layout and packaging is left to the builder. I chose to use IRF540s for convenience and price. The number and quality of FETs can be changed to meet the demands of the builder, but must be N-type and rated for 100Vdc. The use of a heat sink is recommended. In model boats it is common to water-cool the FETs. The number, quality, and cooling efficiency of the FETs will determine current capability. Because this circuit does not include some safety features that you would find on a commercial unit, the builder/operator should exercise caution when experimenting with this device.
DISCLAIMER
This information is for experimental use only. I do not assume any responsibility for injury or damages resulting from the use of any information found in this application note.